任务功能
碰撞预防
防碰撞功能可用于在无人机撞上障碍物之前自动减速并停止无人机。当多旋翼飞行器使用基于加速度的定位模式(或垂直起降飞行器在多旋翼飞行器模式下)时,可以启用此功能。
它可以为多旋翼飞行器在位置模式下启用,并且可以使用来自外部伴随计算机、通过 MAVLink 的外部测距仪、连接到飞行控制器的测距仪或上述任何组合的传感器数据。
如果传感器范围不够大,防碰撞功能可能会限制无人机的最高速度!它还会阻止无人机在没有传感器数据的方向行驶(例如,如果没有后方传感器数据,无人机将无法向后行驶)。
如果高速飞行至关重要,请考虑在不需要时禁用防碰撞功能。
确保在你想要飞行的所有方向上都有传感器/传感器数据(启用防碰撞功能时)。
更多内容请参考px4官方文档 https://docs.px4.io/v1.16/en/computer_vision/collision_prevention
精准着陆
PX4支持多旋翼飞行器对静止或移动目标进行精确着陆。目标信息可由机载红外传感器和着陆信标提供,也可由外部定位系统提供。
精确着陆可以作为任务的一部分启动/发起,也可以在返航模式着陆中启动,或者通过进入精确着陆飞行模式启动。
只有具备有效的全局位置信息才能实现精确着陆(这是由于当前位置控制器实现方式的限制)。
更多内容请参考px4官方文档 https://docs.px4.io/main/en/advanced_features/precland
目标跟随
“跟随我”模式允许多旋翼飞行器自主保持相对于另一个系统的位置和高度,该系统使用FOLLOW_TARGET MAVLink 消息广播其位置(以及可选的速度)。
信息
- 模式为自动模式——无需用户干预_即可_控制车辆。
- 该模式至少需要有效的本地位置估计(不需要全局位置)。
- 飞行器�如果没有有效的本地位置信息,就无法切换到这种模式。
- 飞行器在失去位置估计时将启动故障保护机制。
- 此模式会阻止车辆启动(切换到此模式时,车辆必须处于启动状态)。
- 该模式要求风力和飞行时间在允许的范围内(通过参数指定)。
- 目前该模式仅支持多旋翼飞行器(或 MC 模式下的 VTOL)。
- 目标对象还必须能够提供位置信息。
- QGroundControl在配备 GPS 模块的 Android 设备上支持跟随模式, MAVSDK也支持该模式。
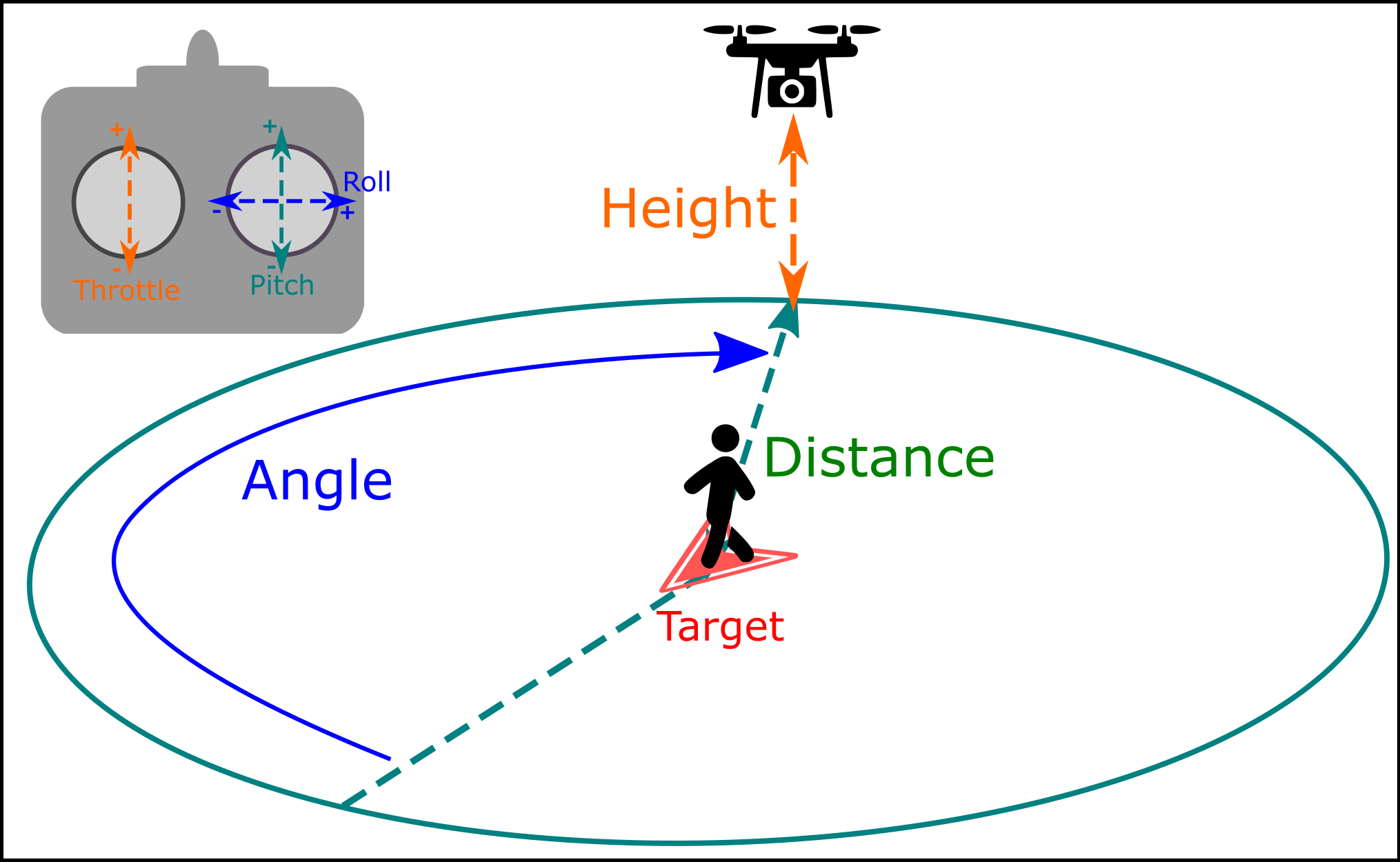
根据高度控制模式,车辆将自动偏航以从指定的相对角度、距离、高度和海拔方向面向并跟踪目标。
默认情况下,它将从目标正后方 8 米处跟随,高度比初始位置(启动位置)高 8 米。
用户可以使用如上图所示的遥控器调整跟随角度、高度和距离:
-
跟随高度由油门控制
up-down。将摇杆置于中心位置可使跟随目标保持恒定高度。上下摇杆可调整高度。 -
跟随距离由输入(“俯仰”)控制
forward-back。向前推动摇杆增加跟随距�离,向后拉动摇杆减少跟随距离。 -
跟随角度由“Roll”输入控制
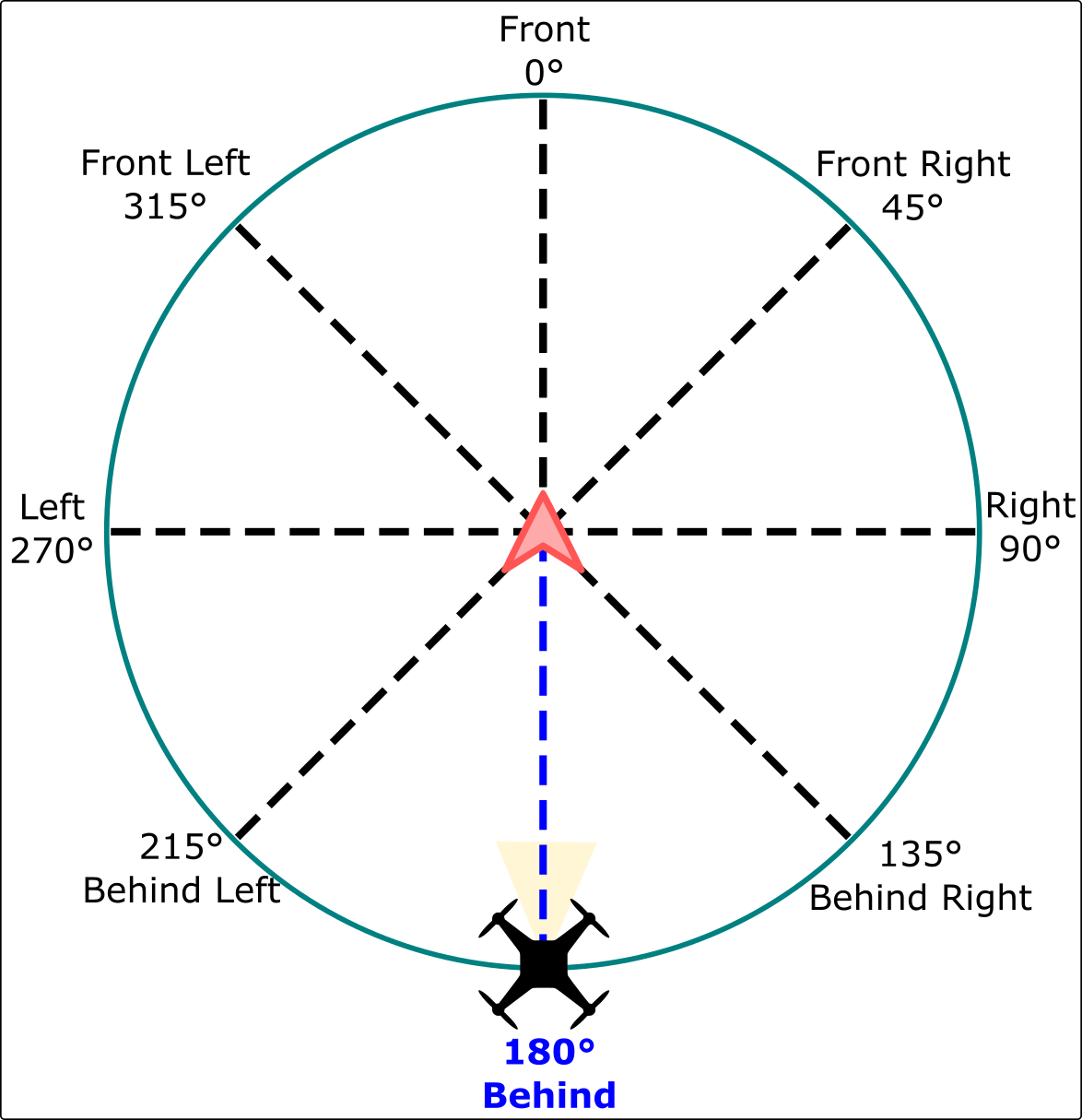
left-right。该移动是从用户视角出发的,因此如果您面向无人机并向左移动摇杆,无人机将向您的左侧移动。如果您从上方俯视并向左移动摇杆,无人机将逆时针旋转。跟随角定义为相对于目标航向(0 度)顺时针方向增加的角度。
使用遥控器设置的角度、高度和距离值在退出跟随模式时将被清除。如果您退出跟随模式并再次激活,这些值将重置为默认值。
更多内容请参考px4官方文档 https://docs.px4.io/main/en/flight_modes_mc/follow_me
地形保持
PX4 支持在位置和高度模式下进行地形跟随和地形保持,适用于具有距离传感器的多旋翼飞行器和MC 模式下的垂直起降飞行器。
PX4 本身并不“原生”支持任务中的地形跟随。可以使用QGroundControl来定义大致跟随地形的任务(它只是根据地形高度设置航点高度,其中航点处的地形高度是从地图数据库中获取的)。
地形跟随功能使飞行器在低空飞行时能够自动保持相对恒定的离地高度。这对于避开障碍物以及在飞越复杂地形(例如进行航拍摄影)时保持恒定高度非常有用。
启用地形跟随功能后,PX4 使用扩展卡尔曼滤波器 (EKF) 估计器的输出提供高度估计值,并使用估计的地形高度(通过另一个估计器,根据距离传感器测量值计算得出)提供高度设定值。随着与地面距离的变化,高度设定值会进行调整,以保持离地高度恒定。
在高海拔地区(当估计器报告距离传感器数据无效时),飞行器切换到_高度跟踪模式_,通常会以接近恒定的高度(高于平均海平面)飞行,并使用绝对高度传感器获取高度数据。
更准确地说,车辆将使用在“使用 PX4 的导航滤波器 (EKF2) > 高度”中定义的可用选定高度数据源。
通过将MPC_ALT_MODE设置为 1来启用地形跟随功能。
更多内容请参考px4官方文档 https://docs.px4.io/main/en/flying/terrain_following_holding
投掷发射
此功能是在 PX4 v1.15 中引入的。
- 目前尚未在不同的车辆配置或场景下进行广泛测试。
- 大部分测试都是在位置模式下进行的。其他模式也应该有效。
此功能允许从固定位置启动多旋翼飞行器,然后将其抛向空中。飞行器仅在检测到发射后才会启动电机,并根据其当前模式运行。
启用投掷发射功能后,飞行器初始处于“锁定”状态,此时螺旋桨不会旋转。螺旋桨只有在飞行器被投掷或解除武装后才会启动,在此期间会持续播放武装提示音。飞行器武装后不会自动解除武装,如果您选择不投掷飞行器,则必须手动解除武装。
该车辆通过检测自身是否达到一定速度(5米/秒)来判断是否被抛出,并在抛掷的最高点(一旦检测到开始下落)启动电机。你需要将车辆抛掷到足够高的高度,使其在下落到人群或障碍物附近之前能够稳定下来。
- 该模式默认处于禁用状态,必须在布防前使用参数启用。
- 启用此功能后,您将无法使用正常模式从地面起飞。
- 无人机在完成武装后、投掷前不应进行运输。尤其不应在移动平台上进行投掷。这是因为启动电机的�条件取决于多旋翼飞行器的绝对速度,而没有考虑任何额外的移动。尝试从移动平台上投掷无人机可能会导致电机过早启动。
投掷发射很危险,因为它需要操作员手持武装的多旋翼飞行器,并在飞行器飞行时待在附近。
测试前,请确保飞机能够以正常姿态或起飞模式起飞。同时,请确保启用该功能后,螺旋桨在启动时不会旋转。
此外:
- 佩戴安全防护装备。建议佩戴护目镜和工作手套。
- 配备易于操作且经过测试的紧急停止开关。提醒操作员保持注意力集中,并在必要时使用紧急停止开关。飞行员往往会忘记车辆是可以更换的,但事实并非如此!
- 尽可能在不使用螺旋桨的情况下进行测试。将拆卸螺旋桨的工具放在附近/方便取用的地方。
- 至少需要两个人来测试此功能——一个人操控飞机,另一个人使用遥控器。
- 请注意,投掷后飞机的确切飞行轨迹可能难以预测,因为它很大程度上取决于投掷方式。有时它会保持静止,但有时(例如,由于大幅度滚转),它在稳定过程中可能会向一侧漂移。请保持安全距离!
对于新飞行器的首次飞行,我们建议进行不带螺旋桨的抛掷发射测试
更多内容请参考px4官方文档 https://docs.px4.io/main/en/flight_modes_mc/throw_launch
空中交通规避
PX4 支持使用标准 MAVLink 接口的ADS-B、FLARM或UTM应答器执行任务时进行简单的空中交通规避。
如果检测到潜在的碰撞,PX4 可以发出警告、立即着陆或返回(取决于NAV_TRAFF_AVOID的值)。
PX4 交通规避功能可与使用 MAVLink ADSB_VEHICLE消息提供应答器数据的 ADS-B 或 FLARM 产品以及使用 MAVLink UTM_GLOBAL_POSITION消息提供应答�器数据的 UTM 产品配合使用。
它已使用以下设备进行过测试:
- PingRX ADS-B Receiver (uAvionix)
- FLARM
更多内容请参考px4官方文档 https://docs.px4.io/main/en/peripherals/adsb_flarm#ads-b-flarm-utm-receivers-air-traffic-avoidance