1.1.1 USX51算力飞控

产品描述
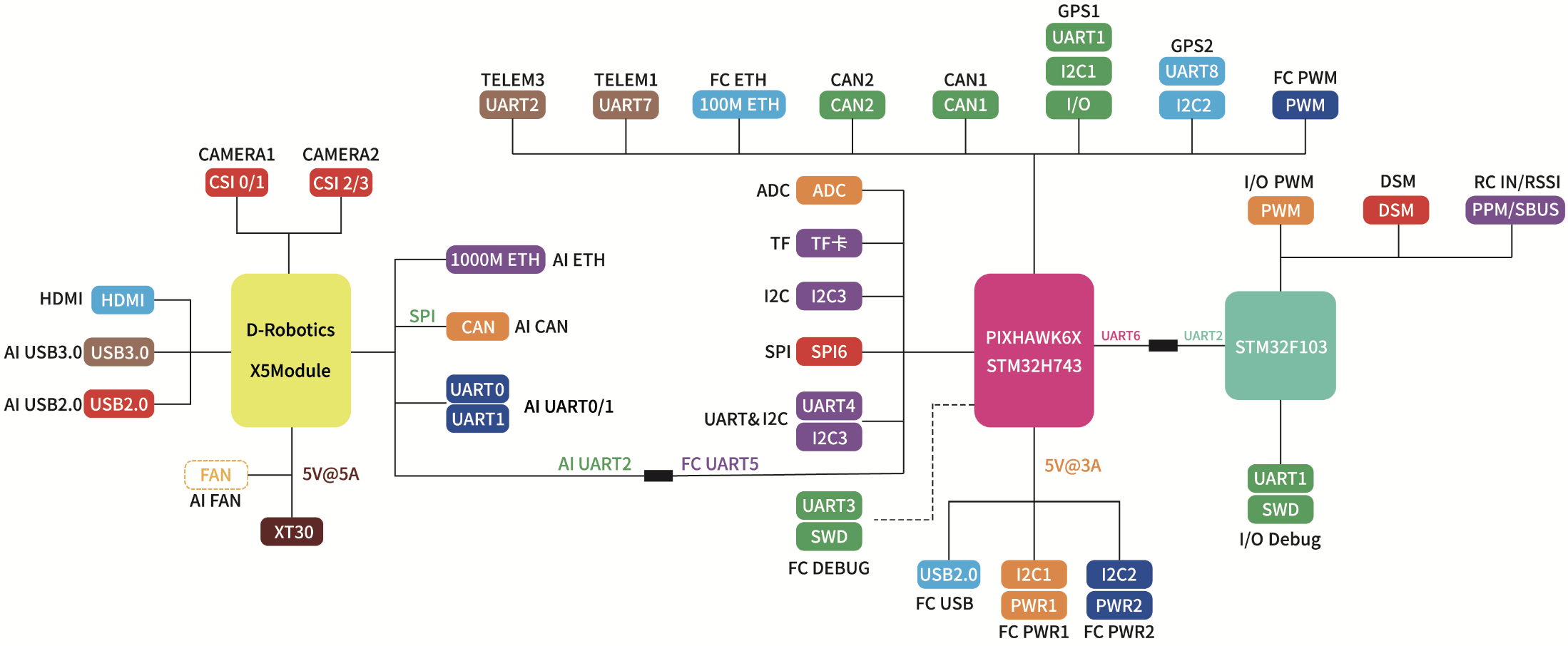
USX51 算力飞控融合 Pixhawk 6X 成熟飞控架构与 D-Robotics X5 AI 芯片,是集稳定飞行控制与端侧智能计算于一体的机载飞控平台。它可依托 PX4/ArduPilot 固件实现高可靠飞行管控,同时凭借 X5 芯片的 BPU AI 算力达 10 TOPS,在本地�实时运行各种神经网络算法,包括图像识别、目标检测、语义分割、人体识别、目标统计、空间感知、强化学习等算法,。CPU 通用计算能力达 21.6 DMIPS/MHz,可运行 VIO 视觉里程计、LIO 激光雷达里程计、 SLAM 建图定位、Navigation2 导航、路径规划等算法,无需依赖云端即可完成感知、决策与执行闭环。模块兼容 RTK、UWB、光流、ADS-B 等多类外设,支持多传感器数据融合与任务智能规划,兼顾飞行安全性、定位精准度与作业自主性。广泛适用于工业巡检、科研开发、自主作业等对飞行稳定与边缘智能有双重需求的无人机场景。
规格参数
机载计算机 (OBC)
| 参数 | 规格 |
|---|---|
| 芯片型号 | D-Robotics X5 SIP |
| CPU | 8x A55@1.5GHz |
| BPU | 10 TOPS |
| GPU | 32 Gflops |
| RAM | 8GB LPDDR4 |
| Storage | 32GB eMMC |
| 系统 | Ubuntu 22.04 |
| 输入 | 5V/5A |
RDK X5 Module
RDK X5 Module搭载Sunrise 5智能计算芯片,可提供高达10 Tops的算力,是一款面向智能计算与机器人应用的全能开发套件,接口丰富,极致易用,支持Transformer、RWKV、Occupancy、Stereo Perception等多种复杂模型和最新算法,加速智能化应用快速落地。
算法支持
- 目标检测:FCOS、YOLO、FasterRCNN、Efficientdet、Mobilenet_ssd
- 图像分类:Mobilenet
- 语义分割:Unet
- 应用算法:人体检测与跟踪、手势识别、人手关键点检测、单目高程网络、单目3D检测、语音处理
更多软件算法应用请参考 D-Robotics 社区官方文档
CSI Camera 支持
| 序号 | Sensor | 分辨率 |
|---|---|---|
| 1 | IMX219 | 800W |
| 2 | OV5647 | 500W |
| 3 | IMX477 | 1230W |
信息
为了方便插拔,USX51将该接口改成Micro-HDMI接口类型。
飞控 (FMU)
| 参数 | 规格 |
|---|---|
| FMU 处理器 | STM32H753 – Arm® Cortex®-M7 480MHz, 2MB memory, 1MB SRAM |
| IO 处理器 | STM32F103 – Arm® Cortex®-M3 72MHz, 64KB SRAM |
| 加速度计/陀螺仪 | ICM-45686 × 3 |
| 指南针 | BMM150 |
| 气压计 | BMP388 + ICP20100 |
| 输入 | 5V / 5A |
| 工作温度 | -20 ~ 70°C |
| 尺寸 | 122 × 58 × 28mm |
| 重量 | 170g |
| 功耗 | 8.7W |
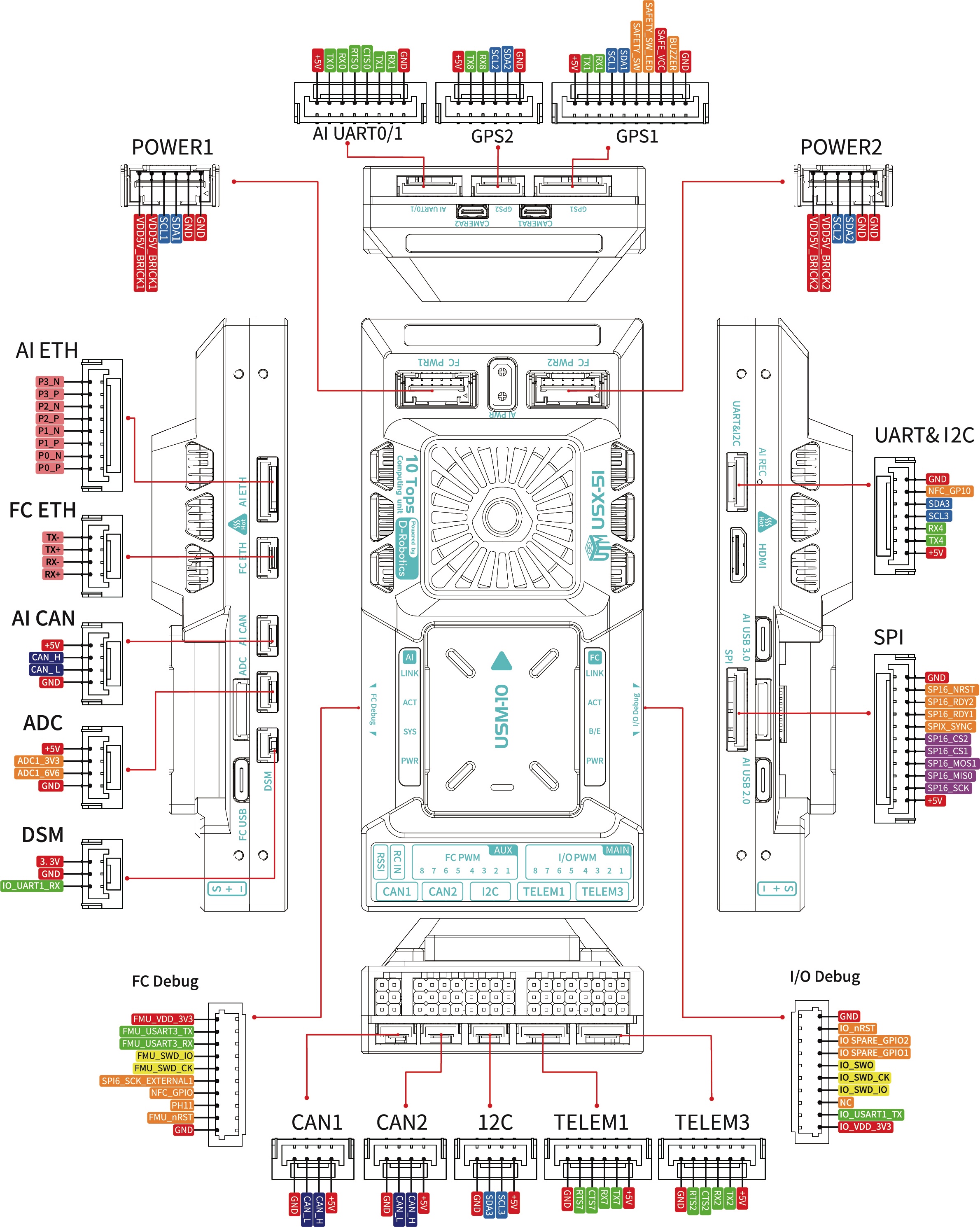
接口定义
| 接口名称 | 功能说明 | 接口类型 |
|---|---|---|
| FC PWR1 | 飞控电源输入1,带I2C (Flight controller power input1, with I2C) | MOLEX-6P |
| FC PWR2 | 飞控备用电源输入2,带I2C (Flight controller power input2, with I2C) | MOLEX-6P |
| AI PWR | AI电源输入 (AI Power input) | XT30 |
| CAN1 | 飞控CAN1总线 (Flight controller CAN1 bus) | GH1.25-4P |
| CAN2 | 飞控CAN2总线 (Flight controller CAN2 bus) | GH1.25-4P |
| I2C | 飞控I2C总线 (Flight controller I2C bus) | GH1.25-4P |
| TELEM1 | 飞控串口 (Flight controller serial port) | GH1.25-6P |
| TELEM3 | 飞控串口 (Flight controller serial port) | GH1.25-6P |
| SPI | 飞控SPI接口 (Flight controller SPI port) | GH1.25-11P |
| UART&I2C | 飞控串口&I2C (Flight controller serial and I2C port) | GH1.25-7P |
| GPS1 | GPS模块接口 (GPS module interface) | GH1.25-10P |
| GPS2 | GPS模块接口 (GPS module interface) | GH1.25-6P |
| ADC | A/D信号输入 (Analog to digital signal input) | GH1.25-4P |
| DSM | DSM接收机接口 (DSM receiver interface) | GH1.25-3P |
| RSSI | 信号强度输出 (Signal strength output) | 2.54 DIP-3P |
| RC IN | S-BUS/PPM信号输入 (S-BUS/PPM signal input) | 2.54 DIP-3P |
| FC PWM1~8 | 飞控PWM输出 (Flight controller PWM output) | 2.54 DIP-3P × 8 |
| I/O PWM1~8 | 协处理器PWM输出 (Coprocessor PWM output) | 2.54 DIP-3P × 8 |
| FC ETH | 飞控网口 (Flight controller network port) | GH1.25-4P |
| FC USB | 飞控USB接口 (Flight controller USB interface) | Type-C |
| AI ETH | AI模块网口 (AI network port),默认静态IP:192.168.127.10 | GH1.25-8P |
| AI CAN | AI模块CAN接口 (AI CAN port) | GH1.25-4P |
| AI UART0/1 | AI模块串口 (AI serial port) | GH1.25-8P |
| AI USB2.0 | AI模块USB2.0接口 (AI USB2.0 port),USB Device模式,用于连接主机实现ADB、Fastboot、系统烧录 | Type-C |
| AI USB3.0 | AI模块USB3.0接口 (AI USB3.0 port),USB Host模式,用于接入USB 3.0外设 | Type-C |
| AI REC | AI模块升级按钮 (AI upgrade button) | - |
| HDMI | AI视频输出 (AI video output),最高支持1080P分辨率 | miniHDMI |
| CAMERA1 | CSI摄像头1接口 (CSI camera1 interface) | microHDMI |
| CAMERA2 | CSI摄像头2接口 (CSI camera2 interface) | microHDMI |
| FC Debug | 飞控调试口 (Flight controller debugging port) | SH1.0-10P |
| IO Debug | 飞控协处理器调试口 (Flight controller coprocessor debugging port) | SH1.0-10P |
指示灯
| 指示灯 | 说明 |
|---|---|
| FC LINK | 飞控网口指示灯 |
| FC ACT | 飞控工作指示灯 |
| FC B/E | 飞控BOOT/ERR指示灯 |
| FC PWR | 飞控供电指示灯 |
| AI LINK | AI网口指示灯 |
| AI ACT | AI工作指示灯 |
| AI SYS | AI系统指示灯 |
| AI PWR | AI电源指示灯 |