PX4+Gazebo硬件在环HIL仿真配置
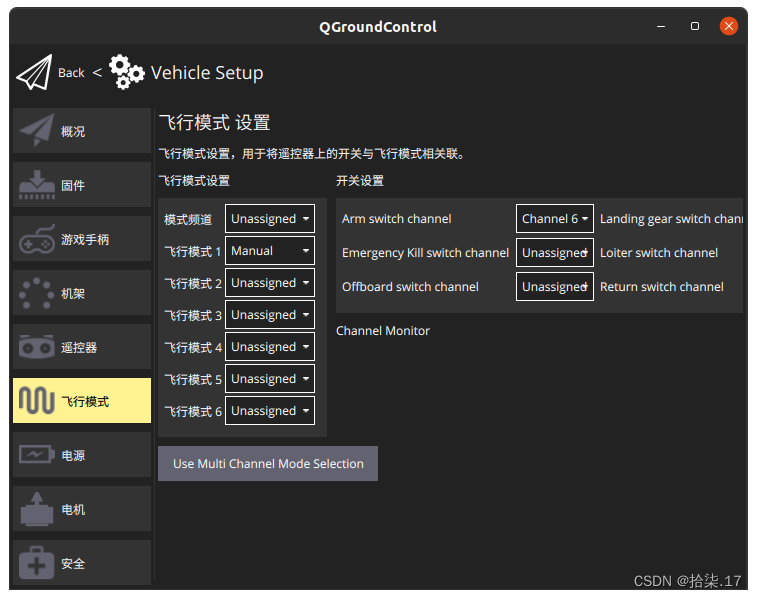
1.将飞控通过USB连接电脑,打开QGC,选择Vehicle Setup -> 安全 -> 硬件在环仿真 -> HILT enable。

2. 选择Vehicle Setup -> 机架 -> HILT Quadcopter X(此处需要重启飞控才能生效)。

3.校准 RC 遥控器(若没有也可略过此步骤)。
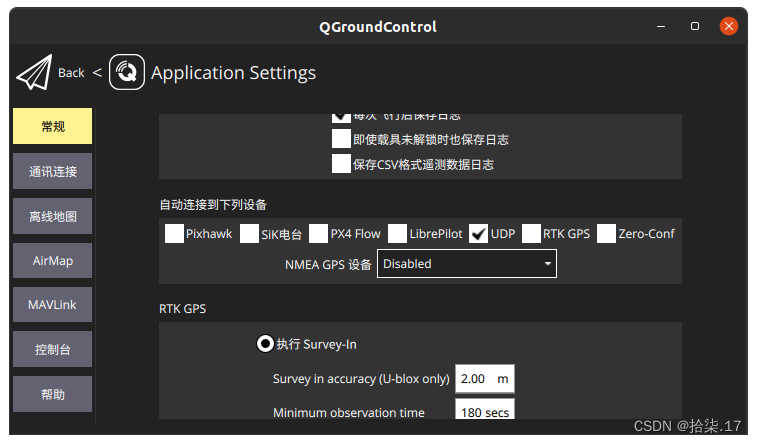
4.打开Application Settings -> 常规,在下图的连接选项中只保留UDP。
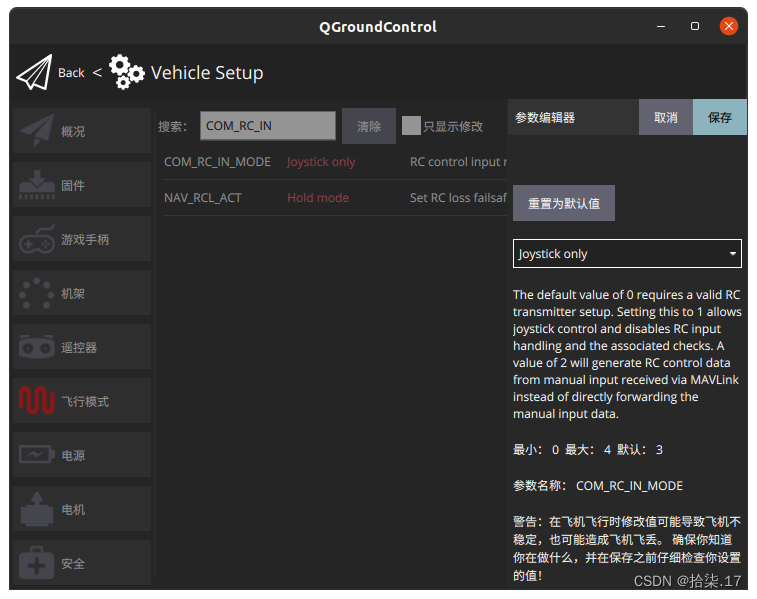
5.选择Vehicle Setup -> 参数,更改参数 COM_RC_IN_MODE ,该参数决定了遥控信号输入模式,博主使用的虚拟遥控器,所以选择的Joystick only,(官网提示的可选择"Joystick/No RC Checks",但v1.13.3版本无该选项),更改完毕后,“飞行模式”设置界面不再出现红色警告提示,可为通道指定不同飞行模式)
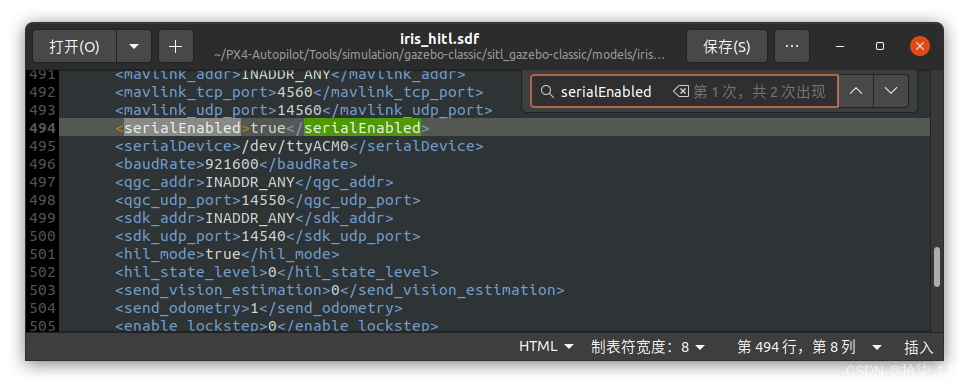
6. 修改iris_hitl.sdf,找到该文件的 mavlink_interface plugin 标签,将 serialEnabled 和 hil_mode 参数更改为 true 。
roscd px4
DONT_RUN=1 make px4_sitl_default gazebo-classic
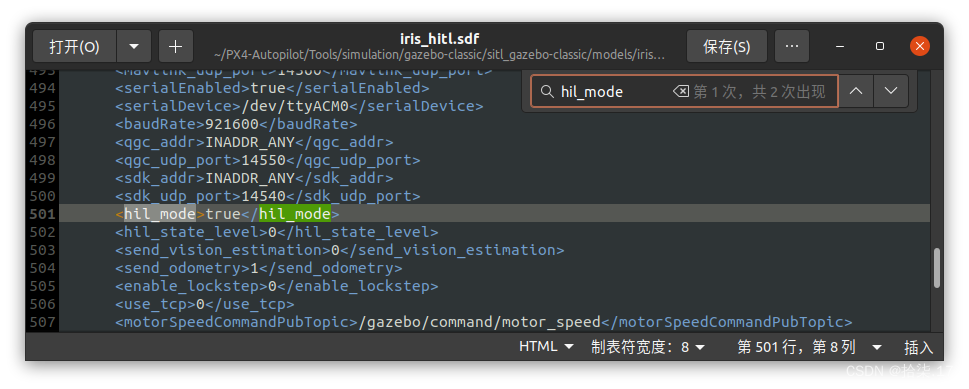
7.检查电脑给飞控分配的USB端口名称是否正确,iris_hitl.sdf文件默认使用的 /dev/ttyACM0,若不是该端口,注意修改成对应的。
 8.source配置环境变量,并运行仿真。
8.source配置环境变量,并运行仿真。
source Tools/simulation/gazebo-classic/setup_gazebo.bash $(pwd) $(pwd)/build/px4_sitl_default
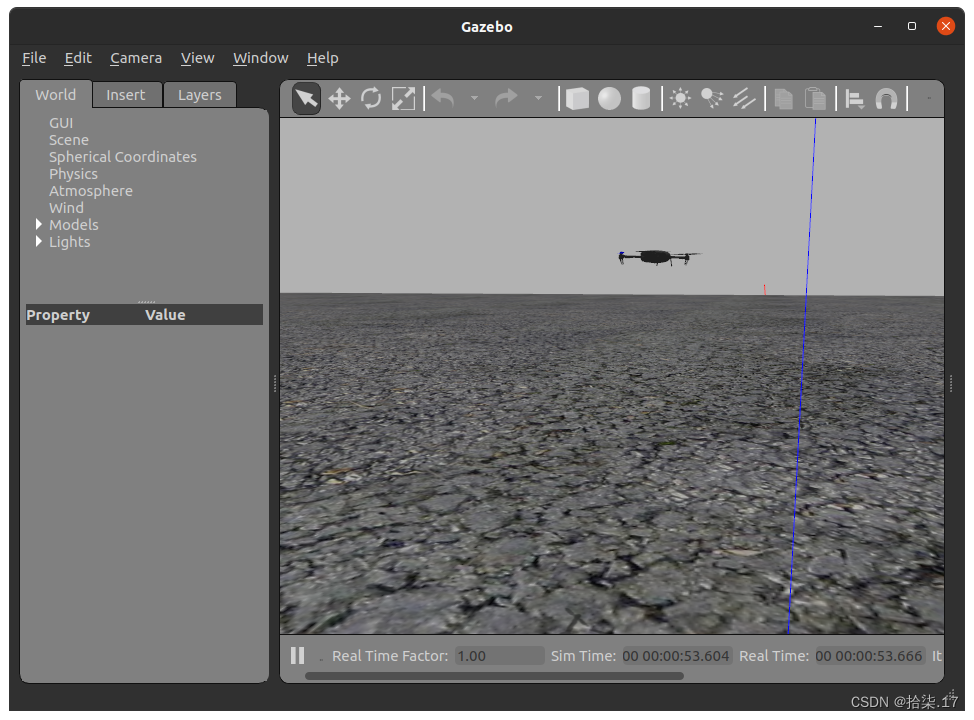
gazebo Tools/simulation/gazebo-classic/sitl_gazebo-classic/worlds/hitl_iris.world
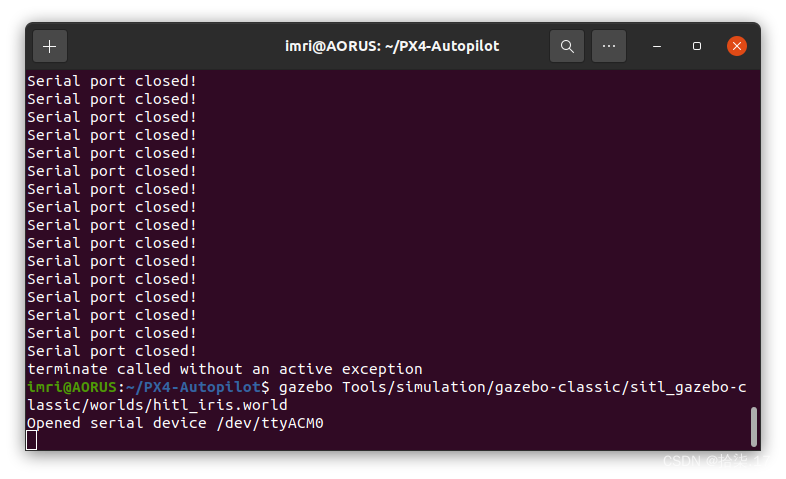
注:若提示Serial port closed,一般为QGC未关闭导致,应先关闭QGC,再运行8中的2行命令,然后再次打开QGC。
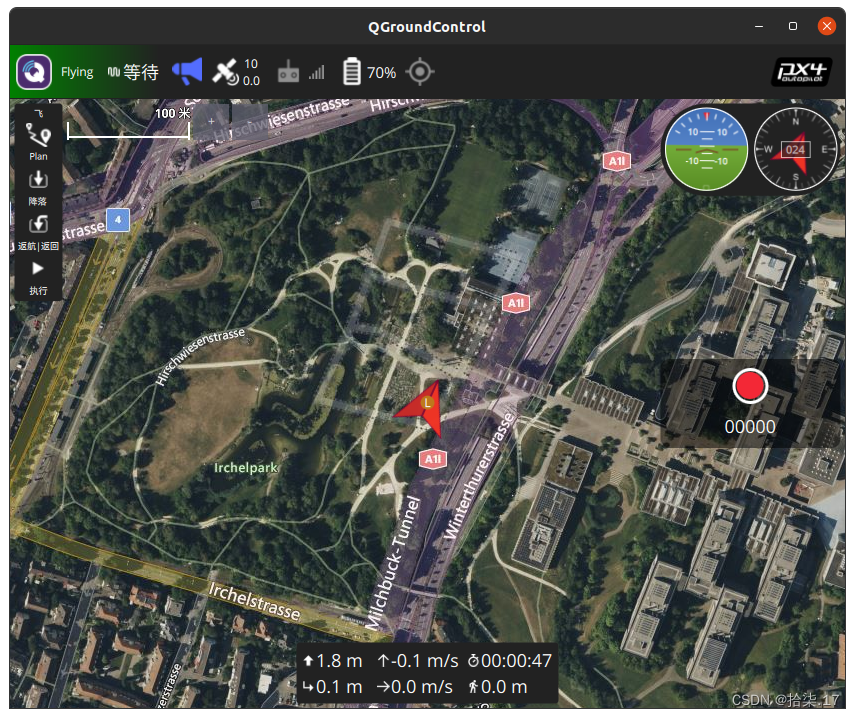
9.地面站解锁,飞机起飞成功!