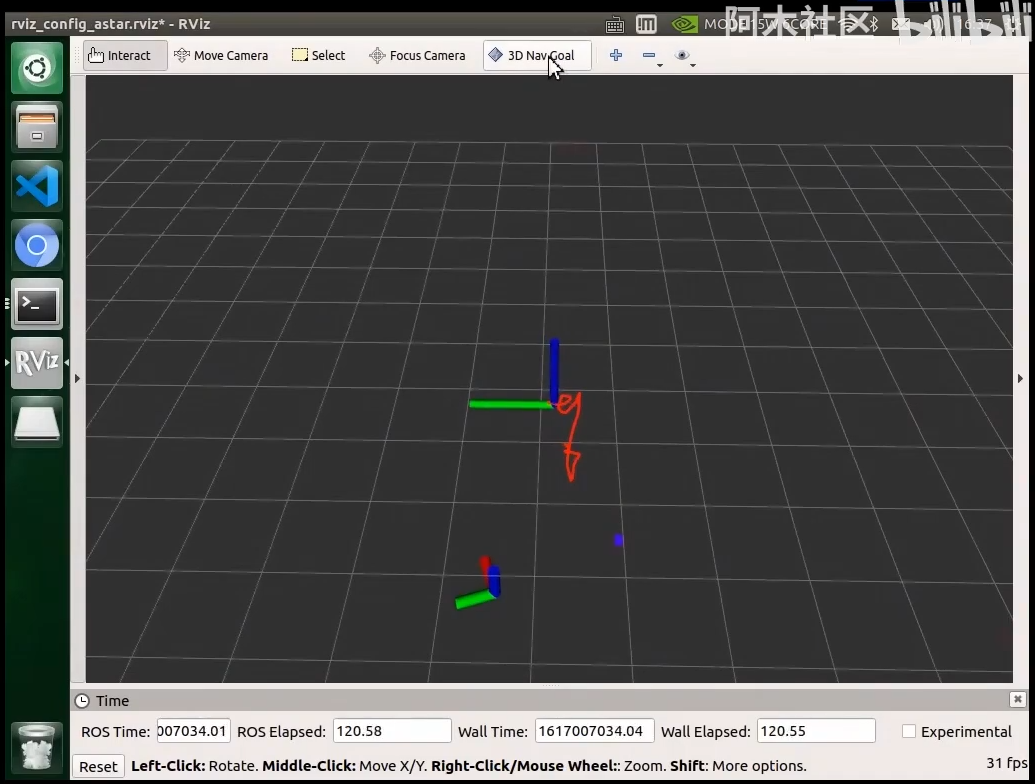
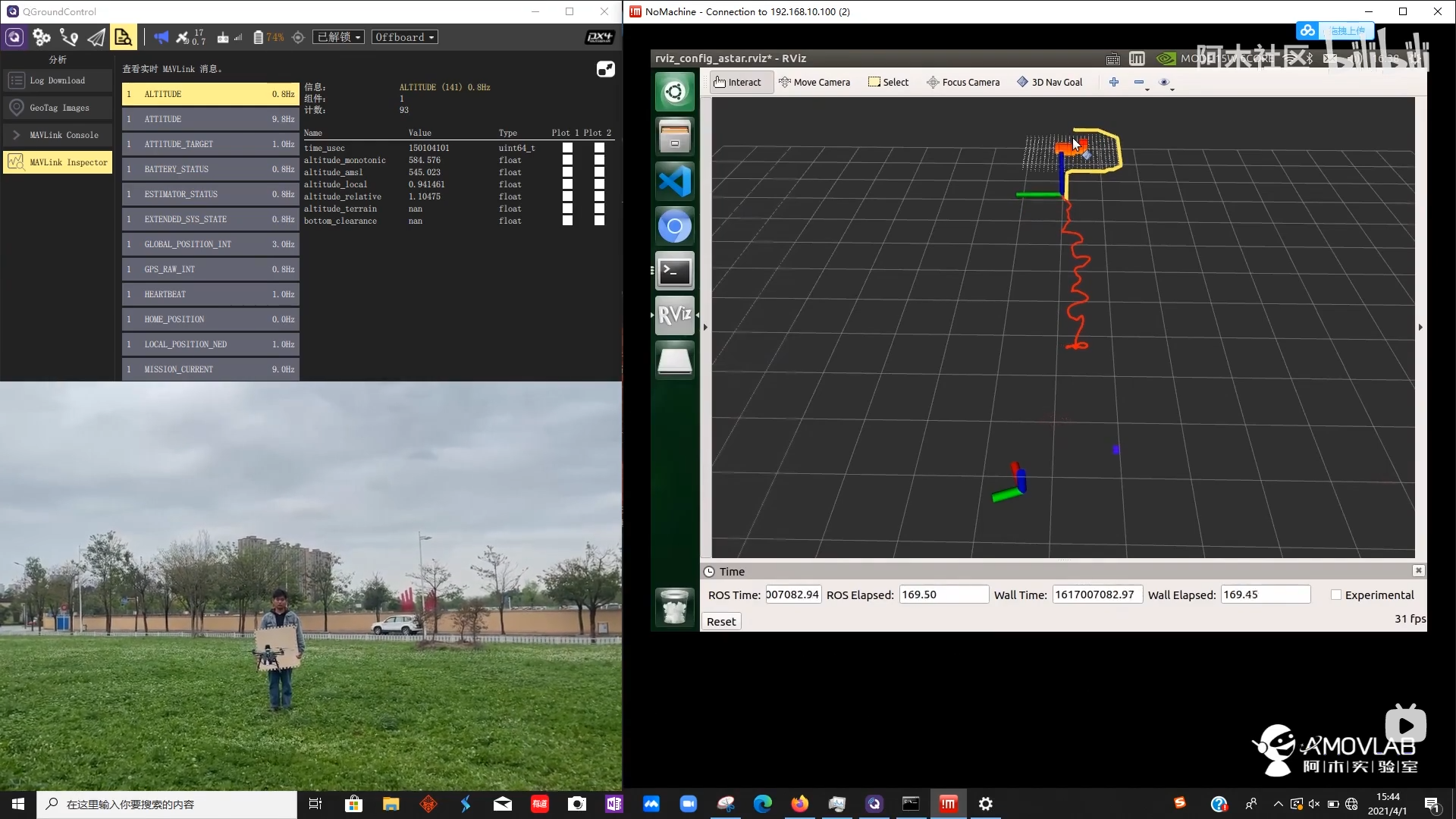
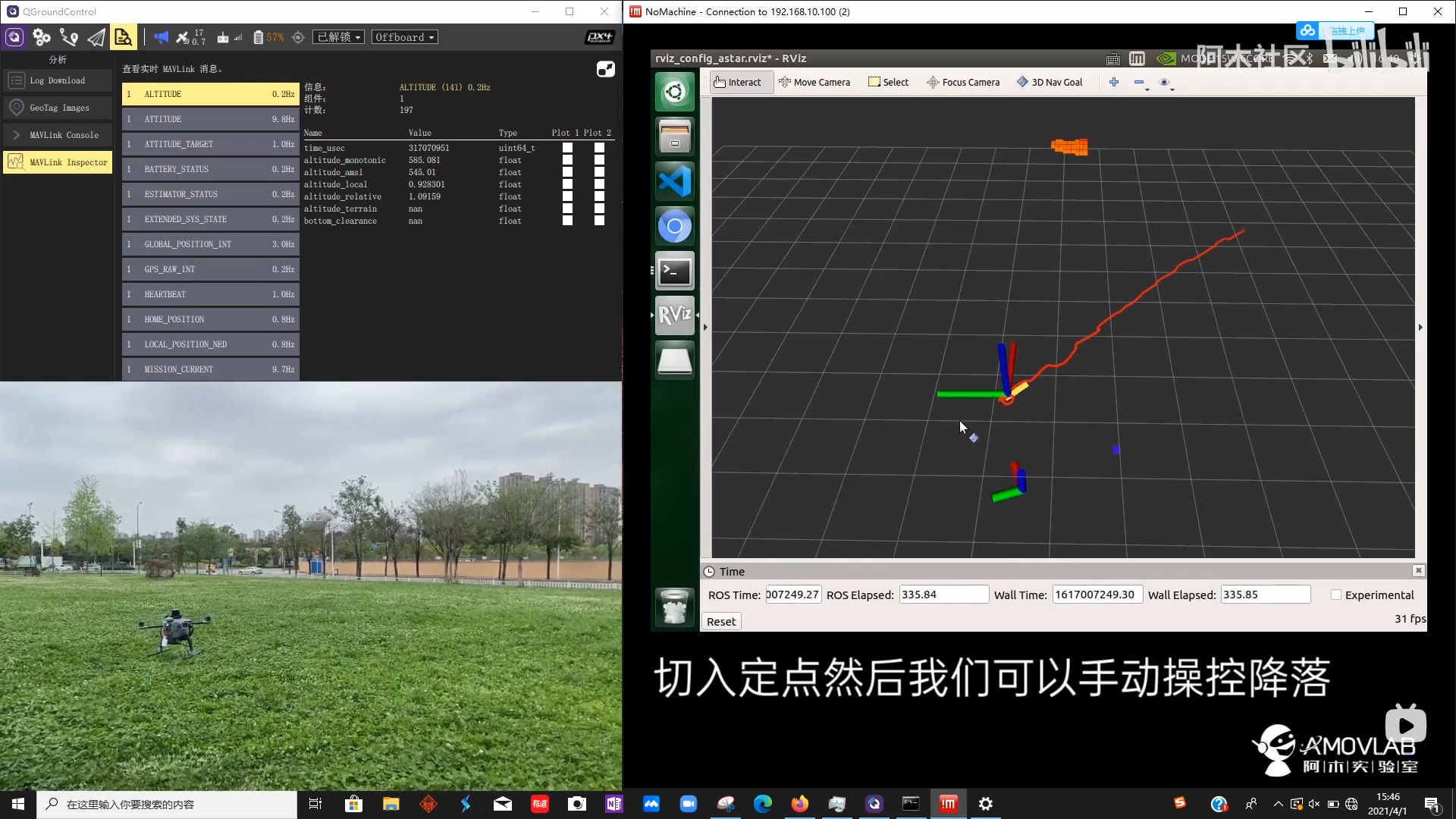
9. 算法开发9.5 仿真模拟器SITLPX4机载计算机offboard模式On this page机载计算机offboard模式 输完以上指令后,遥控器切定点解锁然后切offboard,无人机会自动起飞,等到无人机起飞到一个稳定高度,也即是我们设定的起飞高度后,回到rviz界面,点击选择3D Nav Goal 在rviz上点击一个点作为目标点,会自动生成一个绕开障碍物的路径 此时无人机会沿着这个生成的路径飞,绕开障碍物,且高度会保持不变。 注意! 如果中途无人机飞行不符合预期,及时通过遥控器切出offboard模式,转为position模式手动控制。 降落 无人机飞到目标点后,可以遥控器拨动offboard飞行模式开关切出offboard模式,并缓慢手动降落。