3.1 Pixhawk 6X
- USX51出厂默认已安装v1.15版本PX4固件
通过QGroundControl安装PX4固件
QGroundControl 桌面 版本可用于将 PX4 固件安装到 Pixhawk 系列 飞行控制器板上。
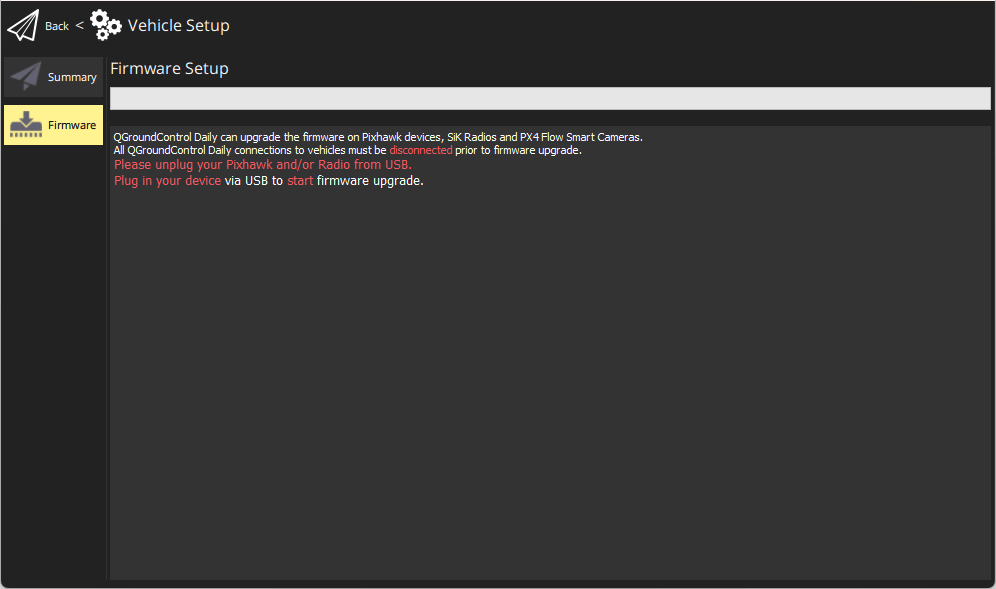
开始安装固件之前,必须断开飞控的所有 USB 连接 (包括直接连接或通过遥测无线电)。不得使用电池供电。
安装PX4稳定版固件
通常,您应该使用最新发布的 PX4 版本,以便从错误修复中受益并获得最新和最强大的功能。
这是默认安装的版本。
要安装 PX4:
- 启动 QGroundControl 软件。
- 选择 “Q”图标 > 车辆设置 > 固件 (侧边栏)以打开 固件设置 。
- 使用USB线将飞控制直接连接到您的计算机。 信息 直接连接到机器上的有源 USB 端口(不要通过 USB 集线器连接)。
- 选择 PX4 Pro Stable Release vX.xx选项 为您的飞行控制器 安装最新稳定版本的 PX4 (自动检测)。
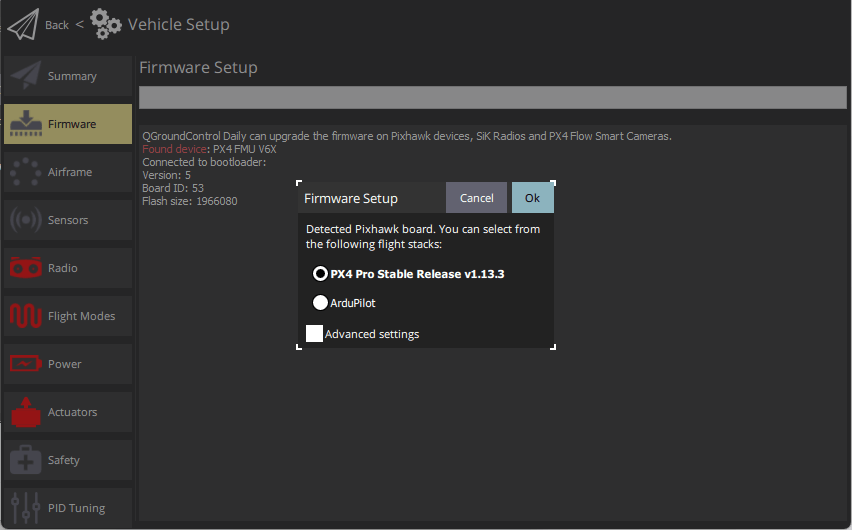
- 单击 “确定” 按钮开始更新。
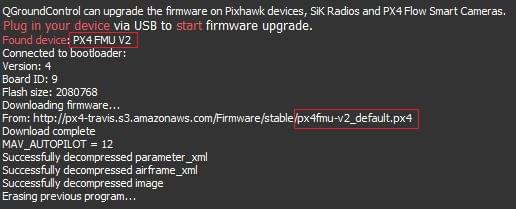
固件将执行一系列升级步骤(下载新固件、清除旧固件等)。每个步骤都会打印在屏幕上,并在进度条上显示总体进度。
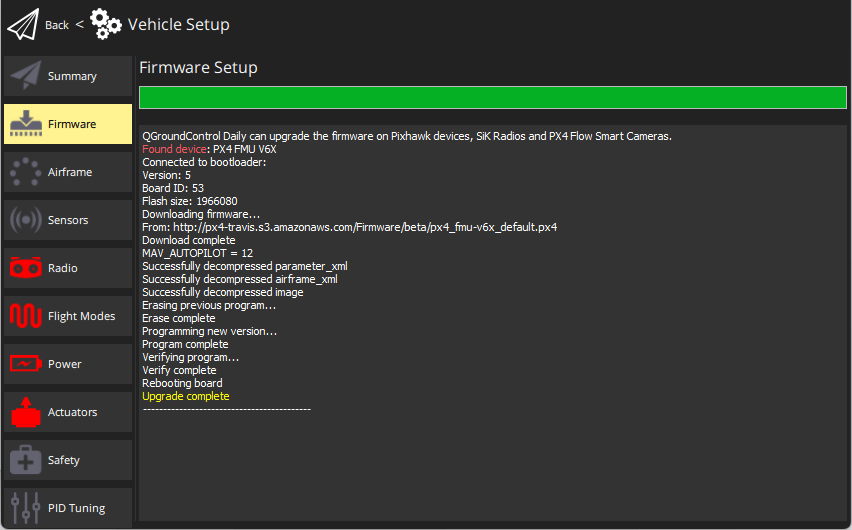 固件完成加载后,设备/车辆将重新启动并重新连接。
提示
如果 QGroundControl 安装了 FMUv2 目标(安装期间查看控制台)并且您有较新的主板,则可能需要 更新引导加载程序 才能访问飞行控制器上的所有内存。
固件完成加载后,设备/车辆将重新启动并重新连接。
提示
如果 QGroundControl 安装了 FMUv2 目标(安装期间查看控制台)并且您有较新的主板,则可能需要 更新引导加载程序 才能访问飞行控制器上的所有内存。
接下来您需要指定 飞行器机身 (然后是传感器、无线电等)
安装PX4主固件、测试版固件或自定义固件
要安装不同版本的 PX4:
- 按上述方法连接车辆,并选择 PX4 Pro Stable Release vX.xx 。
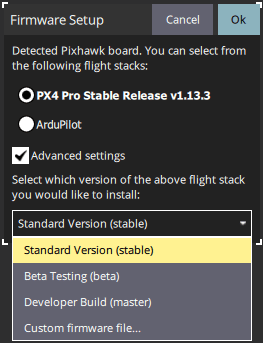
- 检查 高级设置 并从下拉列表中选择版本:
- 标准版(稳定版): 默认版本(即无需使用高级设置来安装!)
- Beta 测试 (beta): Beta 版/候选版本。仅在新版本准备发布时可用。
- 开发人员构建(主): PX4/PX4-Autopilot 主 分支的最新版本 。
- 自定义固件文件...: 自定义固件文件(例如, 您在本地构建的固件文件 )。如果选择此选项,则下一步需要在文件系统中选择自定义固件。
固件更新将像以前一样继续。
引导加载程序更新
Pixhawk 硬件通常预装了适当的引导加载程序版本。
您可能需要更新的情况是安装了 FMUv2 固件的较新的 Pixhawk 开发板。如果 QGroundControl 安装了 FMUv2 目标(安装过程中请查看控制台),并且您使用的是较新的开发板,则可能需要更新引导加载程序才能访问飞行控制器上的所有内存。
您可以按照 Bootloader 更新 > FMUv2 Bootloader 更新 中的说明进行更新。
通过Ubuntu计算机编译PX4源码来安装固件
PX4 固件可以从控制台或 IDE 上的源代码构建,适用于模拟器目标和硬件目标。
下载PX4源代码
PX4 源代码存储在 Github 的 PX4/PX4-Autopilot 存储库中。
git clone https://github.com/PX4/PX4-Autopilot.git --recursive
设置编译开发环境
使用ubuntu.sh脚本设置开发环境,允许您为模拟器或NuttX/Pixhawk工具链进行编译。该脚本旨在在干净的Ubuntu LTS 安装上运行,如果在现有系统或不同的 Ubuntu 版本上运行,则可能无法工作。源代码中的环境设置脚本通常适用于较新的 PX4 版本。如果您使用的是旧版本的 PX4,则可能需要获取特定于您版本的源代码。
运行不带参数的ubuntu.sh(在 bash shell 中)来安装所有内容:
bash ./PX4-Autopilot/Tools/setup/ubuntu.sh
完成后重新启动Ubuntu PC计算机。
为NuttX/Pixhawk构建PX4固件
要为基于 NuttX 或 Pixhawk 的主板构建,请导航到PX4-Autopilot目录,然后make使用主板的构建目标进行调用。
例如,要为Pixhawk 6X硬件构建,您可以使用以下命令:
cd PX4-Autopilot
make make px4_fmu-v6x_default
成功运行将以类似以下内容的输出结束:
-- Build files have been written to: /home/youruser/src/PX4-Autopilot/build/px4_fmu-v6x_default
[954/954] Creating /home/youruser/src/PX4-Autopilot/build/px4_fmu-v6x_default/px4_fmu-v6x_default.px4
构建目标的第一部分px4_fmu-v6x指示固件的目标飞行控制器硬件。后缀(在本例中为_default)指示固件_配置_,例如支持或省略特定功能。
上传固件到Pixhawk
附加upload到 make 命令,通过 USB 线将Pixhawk飞控与Ubuntu PC电脑进行连接,使用以下命令,将编译后的二进制文件上传到自动驾驶仪硬件。例如
make px4_fmu-v6x_default upload
成功运行将以此输出结束:
Erase : [====================] 100.0%
Program: [====================] 100.0%
Verify : [====================] 100.0%
Rebooting.
[100%] Built target upload
您还可以使用以下命令列出所有配置目标:
make list_config_targets
固件版本和 Git 标签
PX4 固件版本 和 自 定义固件版本使用 MAVLink AUTOPILOT_VERSION 消息发布 ,并显示在 QGroundControl 设置 > 摘要 机身面板中:
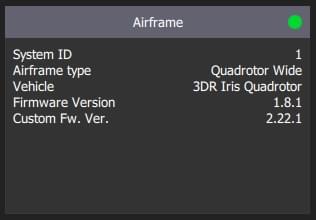
这些是在构建时从你的仓库树的活动 git 标签 中提取的。git 标签的格式应为 <PX4-version>-<vendor-version> (例如,上图中的标签设置为 v1.8.1-2.22.1 )。
如果您使用不同的 git 标签格式,版本信息可能无法正确显示。
更多信息
- QGroundControl 用户指南 > 固件 。
- PX4 设置视频 (Youtube)